×
×
 ×
×
从产品进化的角度来看,PC-based运动控制器相较于专用控制器拥有更高的灵活度,在工业物联网时代,功能上比PLC能够实现面对更为复杂的场景;在一些行业中,PC-based或专用控制器正在逐步替代PLC,如在机器视觉领域的应用。那么对于提供运动控制器的厂商而言,只有不断适应市场需求变化推陈出新,才能在这百亿级的蓝海市场中勇立潮头。
毫无疑问,就运动控制系统的发展趋势来看,易使用、小型化、高性价比、模块化和网络化等是运动控制系统不断迭代的方向。为此,深耕运动控制的研华推出了AMAX-354与AMAX-357控制器,充分满足设备开发商与用户的需求。
专用or通用,需求为先
首先,AMAX-354与AMAX-357是最高可支持到32轴控制的EtherCAT运动控制器,可用于高速、高精度的运动与I/O控制,提供本地Slice I/O扩充远程EtherCAT I/O模块连接,用户可针对需求选择相应的扩充方式。
从产品定位与应用来看,基于ARM-based的AMAX-354控制器的产品定位是专用设备控制器,内建Linux核心具有稳定与低延迟的控制系统,能够充分实现高速、高精度运动控制,其小于智能手机的超微型体积使得空间利用最大化,并提供低代码软件开发环境—MotionNavi Designer,支持研华BASIC语言程序设计,缩短用户的开发与除错时间。
研华工业物联网
概括来看,AMAX-354产品特色:
1.超微型体积;
2.Modbus,、TCP/IP通讯;
3.MotionNavi Designer软件开发;
AMAX-354控制器的优势:
1. 适合桌面型紧凑配电空间设备;
2. 简单且易学习的BASIC语言;
3. 高性价比方案,省成本;
4. 只需500行指令,快速开发;
5. 高可靠度、稳定度、低延迟
AMAX-354控制器充分顺应了高可靠性、实时性、高速高精,开放性、灵活性、易用性并重的产品发展方向,能够适应各种复杂工艺要求,具备了性能上的深度和功能上的宽度,同时还具备了多源异构系统的重构便利性。借助于MotionNavi Designer低代码开发软件,进一步降低了用户的应用门槛,大大提升了易用性。

而基于PC-based的AMAX-357走的是通用型控制系路线,为用户预留了灵活的二次开发接口,设备制造商可根据其设备的控制需求编程开发控制系统,因此AMAX-357控制器具备开放与弹性的架构,为用户打开了二次技术开发、工艺快速迭代升级的技术路径,并为用户自身核心竞争力构建提供了必要的技术手段。用户可采用研华MotionNavi API进行程式开发,支持C/C++、VS.net等高级语言,提供完整范例程式,可快速上手与开发,并提供MQTT等通讯,使用户可以将EthereCAT通讯所采集的OT数据进一步连接IT云端,实现工业4.0与物联网的完美整合。
研华工业物联网
AMAX-357诞生的一个主要目的是为了解决传统工控机+板卡的控制方式引发的设备体积越来越大的问题,帮助用户在紧凑有限的空间内实现高精运动控制。因此,从产品特点上来看,AMAX-357具有微型体积省配件省空间、对比IPC+轴卡方案AMAX-357控制器更省成本、一体化设计可靠度更高等优势。

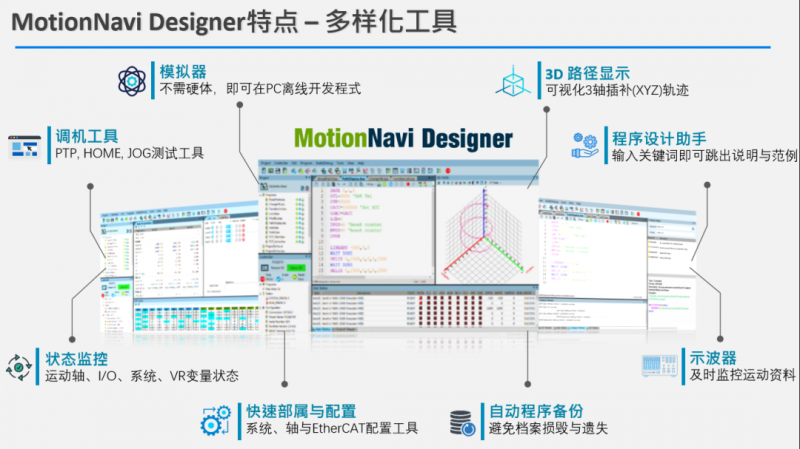
值得一提的是,研华MotionNavi Designer作为一款多样化的开发工具,能够实现弹性自定义,包括自定义变量和子程序,具有支持BASIC语言开发(包括Low-code开发、类Robot语言)、多线程(支持支援10 Task同时运行)、多样通讯(Modbus TCP/IP for HMI、TCP/IP for Vision Integration)、档案操作(存放工单、配置与Log档案)等特点,能够帮助用户高效完成程序开发、机台调试、设备生产、远程调试、产品更换调试等场景下的工作。
为适应需要,开发一体化的逻辑控制、运动控制、视觉控制开发平台是高效、快速开发智能制造生产线和智能制造装备的必然趋势。传统运动控制器虽然集成了PLC功能,但PLC和运动控制是相对独立的两套软件,常需要I/O接口交互按数据实现同步等,造成成本高、系统复杂、维护困难。
而基于研华AMAX-354、MotionNavi Designer的软硬件一体的运动控制系统,以上问题迎刃而解,这一点在接下来的应用展示中亦可全面体现。
深入场景,化繁为专
场景一
效率至上,解决您的后顾之忧

在一条完整的产线中,随着生产工艺的发展需求,控制的设备数量越来越多,实现的控制功能也日趋复杂。在过往,设计者都习惯将其控制在一个大型控制器当中,但因为系统技术发展逐渐庞大且复杂,导致控制系统不稳定性也逐渐提高。在系统正常运转的情况下,将所有控制功能都集中在一起的弊端也许并不明显,而一旦产线中的某一设备发生故障,客户需要把整条产线都暂停以维修出现了问题的设备,直到设备恢复正常,才能整线启动运作。由于停机所造成的生产进度延误、生产效率受影响等等问题,却是生产型客户所不能容忍的。
研华AMAX-354/357控制器,基于边缘控制的概念,化繁为简,客户可以在设备运行过程中快速定位到故障设备,可以将故障的设备单元直接重启或是移除,而不影响整条产线的正常运转,从而降低产线故障停机时间。在生产效率至上的场景下,研华AMAX-354/357控制器即可轻松应对,解决您的后顾之忧。
场景二
专业的事交给专业的人
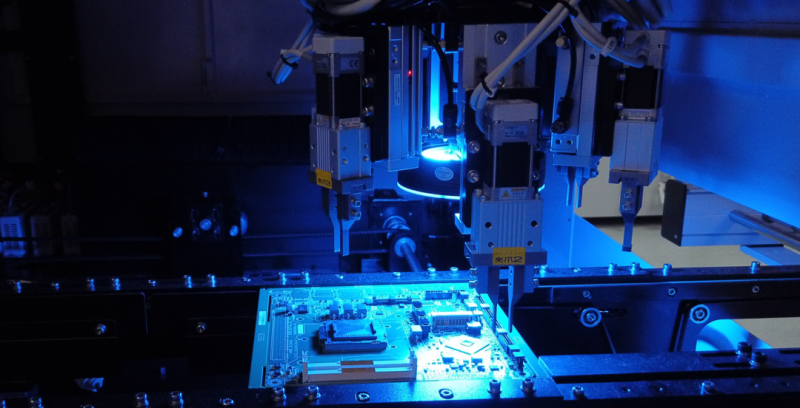
机器视觉的应用是一个复杂的系统,其中涉及到了光源、相机、底层算法、应用算法、运动控制等等模块的配合,而往往懂机器视觉的厂商并不熟悉运动控制。对运动控制系统的开发,如何实现两套系统的稳定交互实时高效联动配合,如何处理当CPU的负荷过高、内存过大、处理流程过多时的卡顿现象,导致机器视觉在完成同一检测任务生产节拍等等问题。
此时,最需要的是把专业的事情交还给专业的人来做,视觉厂商的专长在视觉软硬件方面,而运动控制则可由研华AMAX-354/357控制器来完成。AMAX-354/357的高可靠度、稳定度、低延迟、易开发等特点可完美适应这一场景。当然,机器视觉只是典型应用场景之一,在其余对运动控制要求相对不严苛的场合下,AMAX-354/357控制器均可作为“最佳配角”轻松承担运动控制的角色。
场景三
设备空间有限
在谈到运动控制的发展趋势之时,我们一再强调小型化是一个非常重要的方向,这不仅是因为小型化意味着更灵活,也意味着客户可以集成更多的单元模块,适应小批量、多品种的柔性制造。
比如在半导体领域,高度集成化的设备串联起了整条产线,设备占地空间越大,厂商投入越大,在上下料等要求不高的流程中,完全可以基于研华AMAX-354/357控制器来实现,其相当于智能手机体积大小,可有效应对设备空间的极限挑战。
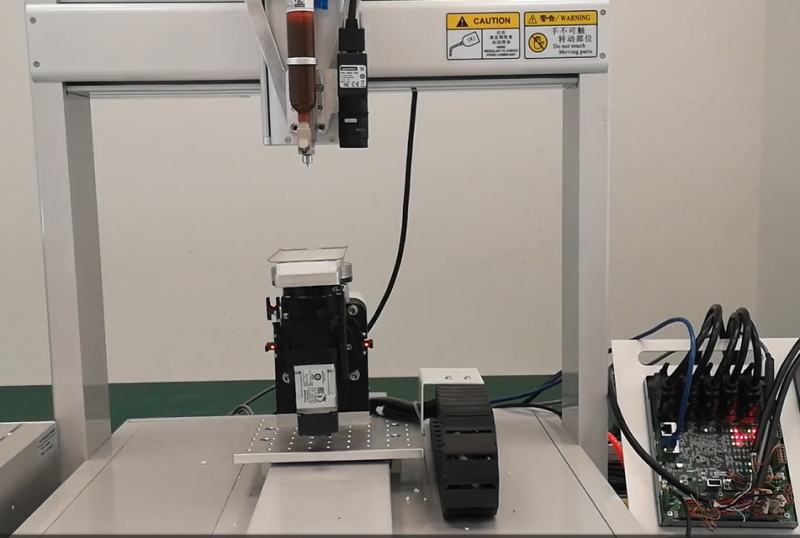
当然,延伸至对空间要求同样严苛的桌面型设备,研华AMAX-354/357控制器依然轻松应对。研华AMAX-354/357控制器小小体积,占地极其有限,将更大的舞台交给客户。
当然,无论市场如何变化,深入客户应用场景,想用户之所想,才是研华AMAX-354/357控制器诞生的初衷,做一个真正的“幕后”助力客户的自动化、智能化升级。