×
×
 ×
×
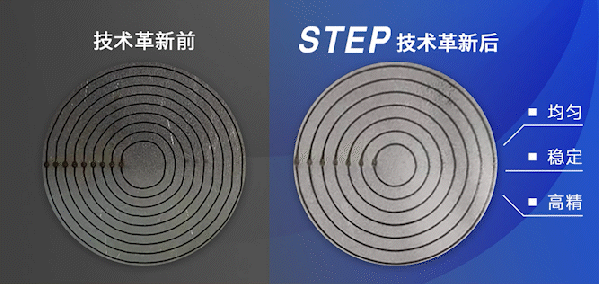
在众多高难度的工业应用中,使用激光切割出完美的小圆,一直是对工业机器人精度和控制能力的极限测试。小圆的直径越小,对机器人的精准定位和轨迹追踪能力的要求就越高。正是因此,在精度要求高的汽车零部件等行业,切小圆应用一直被国际机器人品牌视为禁脔,不容染指,总部位于瑞士的工业机器人高端品牌S公司更是长期在该领域独占鳌头。
然而,伴随着高水平国产替代进程的加速,掌握机器人核心技术的新时达,经过长期的实践摸索,通过创新的算法和优化机械结构,提升了切小圆所需的精度和刚性,一举突破了这一技术瓶颈。
工业机器人的"终极一舞"
新时达通过创新的算法,使得绝对点位精度、定点变姿态精度大大提升,小圆精度可达0.15mm,关节位置误差低至0.03°。新时达如何能做到?我们继续往下看。

赋予机器人“精准之眼”
误差建模与绝对精度补偿技术
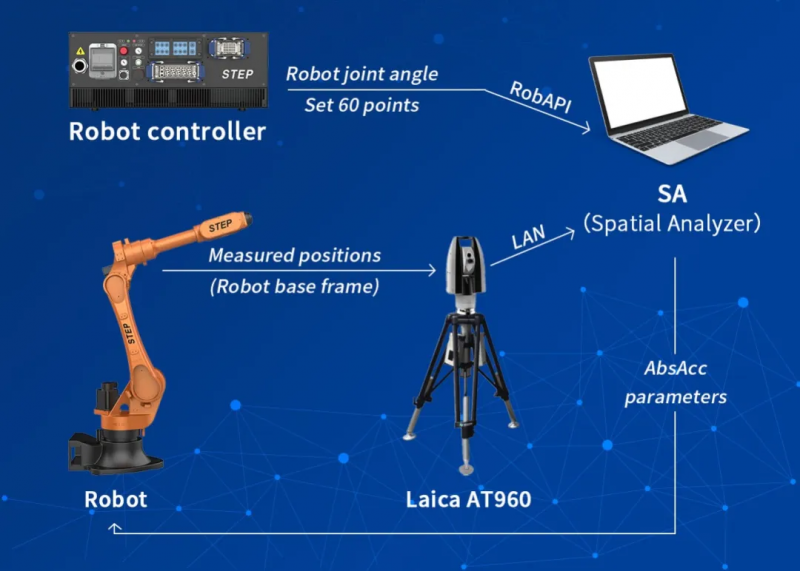
新时达凭借自主研发的全参数激光标定软件与借助高精密激光跟踪仪,实现了对工业机器人连杆参数、减速比、关节柔性等参数的精细测量,结合领先的误差建模与绝对精度补偿技术,实现了对机器人末端位置精准定位。
自学习反向间隙滞后补偿技术
反向滞后是机械系统中普遍存在的现象,也是影响机器人轨迹精度的重要因素之一。
针对这一问题,新时达开发了反向间隙滞后的自学习补偿技术。该技术能够自动检测和补偿机器人在反向运动时的误差,消除齿轮反向运动时的滞后,确保机器人运动的平稳性和准确性。同时根据实际加工效果,系统自动调整补偿参数,以达到最优的补偿效果。
高精度的动力学模型与力矩前馈技术
新时达针对伺服控制引起的轨迹精度误差,引入了高精度的动力学模型与先进的力矩前馈技术。这一高精度模型细致地考虑了机器人的质量分布、关节柔性、负载变化以及摩擦力等多个因素,并特别采用了非线性模型来精确描述低速运动时复杂的摩擦力特性,确保了在各种工作条件下动力学模型的高精度和可靠性。
在伺服控制系统方面,通过融合了先进的控制算法和滤波技术,显著提升了伺服系统的稳定性和快速响应能力,有效减少了机械谐振和末端定位的抖动现象。

优化结构设计
新时达通过对机器人进行静力学与动力学联合仿真,调节机器人各关节的惯量分布,不断优化本体的结构设计,实现机器人的轻量化和高节拍要求。基于多约束条件的参数设计方法,通过对机器人关节力矩约束,核心零部件寿命约束等方式,显著提高了机器人的机械刚性、使用寿命,为机器人实现高精度作业奠定了坚实的基础。
再看一张铸件在优化前后的有限元仿真对比图:
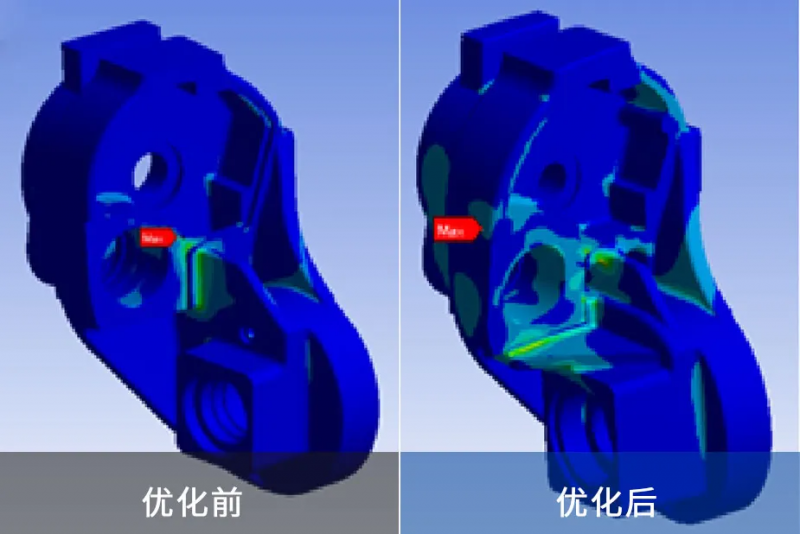
经过仿真计算,改善后铸件应力峰值为改善前铸件应力峰值的40%左右。
千锤百炼出锋芒,不泥一格展新章。通过不断的技术创新和严格的质量控制,新时达机器人在轨迹精度方面已达到行业领先水平,为用户提供了更加精确、可靠的自动化解决方案。